Research |
|
Dr. Balasubramanian's research interests lie at the intersection of robotics and computational neuroscience and biomechanics. He pioneers the unique idea of “simultaneous bio-inspiration and robo-inspiration”. Specifically, he simultaneously draws inspiration from the human control system to advance robotic systems and use robotic systems to develop a stronger understanding of the human body and improve quality of life. Current projects in the lab are below. Previous projects are available in the Publications page. |
|
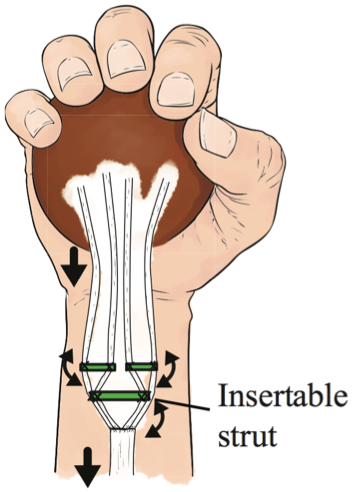
| Re-Engineering the Human Body By Developing Robotics-Inspired Implantable Mechanisms for Orthopedic Surgery Tendon-transfer surgeries are commonly performed for a variety of conditions such as stroke, palsies, trauma, and congenital defects. It involves re-routing a tendon from a dysfunctional muscle to a still-functioning musle to restore lost function. However, a fundamental aspect of the current surgical procedure, namely the suture that attaches the tendon(s) to the muscles, results in poor hand function in physical interaction tasks such as grasping, because of the fixed 1:1 coupling the suture produces between the muscles and tendons. Our group is investigating the use of passive engineering mechanisms, such as hierarchical pulleys, to attach the muscles and tendons. It is expected that this will significantly improve post-surgery grasping capability. Joint work with University of Washington and University of Southern California. |
 |
| Robotic Grasping and Manipulation The goal of this project is to understand and improve upon current algorithms for robotic grasping and manipulation by identifying the strategies that humans use for physical interaction. We use a variety of human-robot interaction paradigms to collect the data, including physical interaction, Mechanical Turk, and teleoperation. This data will be analyzed using a variety of machine learning techniques. Joint work with Prof. Cindy Grimm and Prof. Weng-Keen Wong. |
 |