2.1D TEXTURES
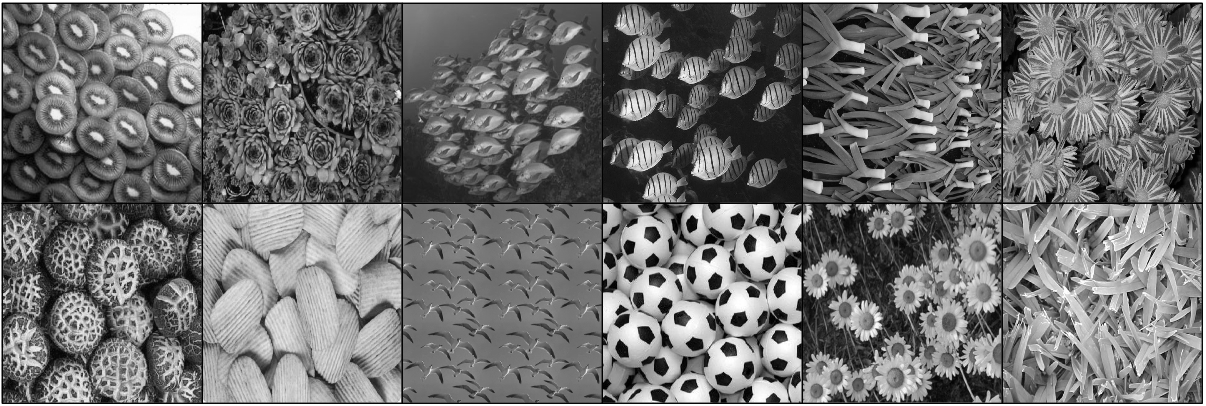
The dataset contains a total of 80 images of homogeneous, natural textures. All textures are on a nearly planar surface, and have been imaged from a direction nearly normal to the plane. The texture elements (or texels) are 3D, but their thickness and depth differences are much smaller than their distance from the camera. Therefore, they offer a good approximation to 2.1D textures.
This new dataset complements the existing benchmarks (e.g. Brodatz, CUReT, PSU Near-regular Texture Dataset, etc.), which do not contain 2.1D textures, or underrepresent challenges arising from the following characteristics of real textures: (1) texel subregions define a separate, finer grain texture which coexists with the main texture; (2) recurrence of a specific texel substructure may be confused with that of the texel; (3) the placement of texels along the surface is random; (4) large variations in texel appearance, size, and boundary shape across the image necessitate statistical modeling; (5) the texels may appear as low contrast, or very thin image regions which are difficult to segment; (6) due to texel overlap, texel contours may form complex patterns (e.g., several edges meet at one point) which makes segmentation difficult; and (7) illumination may vary across the image. The ground truth is obtained by manually segmenting all texels in each image.
TextureDataset.zip contains a total of 80 original images in PGM format, and the corresponding set of annotated images in PPM format in which texels are manually segmented. It also contains file NumTexels.txt that details how many texels appear in each image. The number of texels per image ranges from 13 to 180, with the mean 54.7 and standard deviation 33.6 across the dataset, while the total number of texels in the entire dataset is 4376.
The outer contours of manually segmented texels are provided as ground truth. The contour of each texel is marked with a different (R,G,B) value.
N. Ahuja and S. Todorovic, "Extracting texels in 2.1D natural textures," in Proc. IEEE Int. Conf. Computer Vision (ICCV 2007), Rio de Janeiro, Brazil, 2007.